Author: Chen Chen and C.-C. Jay Kuo
Research Problem
An ensemble classifier, called TEAM (The Experts Assembling Machine), is proposed for the classification of large-scale indoor/outdoor images in this work. Instead of applying a single classification method to a large number of extracted image features, TEAM integrates decisions made by a set of individual classifiers, where each of them is called an expert. Although the classification performance of an expert is reasonable for small datasets, its performance degrades as the dataset size increases. TEAM offers robust and accurate classification performance for a large-scale indoor/outdoor image dataset since it allows experts to compensate each other’s weakness in face of diversified image data. We conduct experiments on an image dataset containing around 100,000 images, and show that TEAM can improve the classification accuracy of individual experts by a margin ranging from 6-20%.
Main Ideas
We set a benchmark for Indoor/Outdoor classification algorithms by releasing a dataset with around 100,000 indoor/outdoor images. Image examples can be seen in Fig.1. We also implemented and released 7 individual experts, in order to benchmark the strength of TEAM. Related source code can be found in the links below.
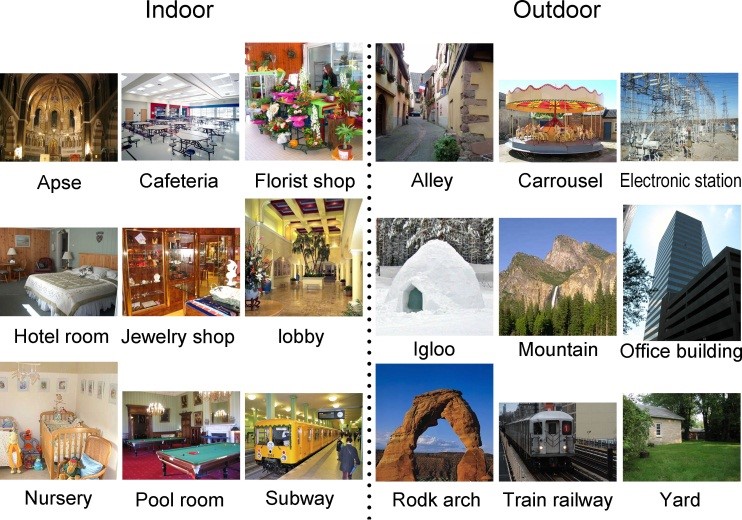 Fig. 1
Fig. 1
Innovations
The proposed TEAM stands on the shoulders of state-of-the-art indoor/outdoor image classification methods. Unlike other ensemble learning algorithms (such as Adaboost and Random Forests), TEAM learned the complementariness between different algorithms at the decision level. Decisions by different methods are achieved by different low-level features and different classification methods. As a result, TEAM can perform more robustly while the data size increases. In addition, TEAM can also serve as a framework for all scene classification problems (not restricted to indoor/outdoor image classification).
Future Challenges
For the future, there are two directions to do.
- Currently, we only focus on low-level feature experts. We can extend our work to more semantic-level feature based approaches.
- For semantic scene classification problem, TEAM should be designed differently.
References
- [1] J. Xiao, J. Hays, K. A. Ehinger, A. Oliva, and A. Torralba, “Sun database: Large-scale scene recognition from abbey to zoo,” in Computer vision and pattern recognition (CVPR), 2010 IEEE conference on, pp. 3485–3492, 2010.
- [2] A. Oliva and A. Torralba, “Modeling the shape of the scene: A holistic representation of the spatial envelope,” International journal of computer vision, vol. 42, no. 3, pp. 145–175, 2001.
- [3] M. Szummer and R. W. Picard, “Indoor-outdoor image classification,” in Content-Based Access of Image and Video Database on, pp. 42–51, IEEE, 1998.
- [4] A. Vailaya, M. A. Figueiredo, A. K. Jain, and H.-J. Zhang, “Image classification for content-based indexing,” Image Processing, IEEE Transactions on, vol. 10, no. 1, pp. 117–130, 2001.
- [5] N. Serrano, A. Savakis, and A. Luo, “A computationally efficient approach to indoor/outdoor scene classification,” in Pattern Recognition, Proceedings. 16th International Conference on, vol. 4, pp. 146–149, 2002.
- [6] A. Payne and S. Singh, “Indoor vs. outdoor scene classification in digital photographs,” Pattern Recognition, vol. 38, no. 10, pp. 1533–1545, 2005.
- [7] C. Pavlopoulou and S. Yu, “Indoor-outdoor classification with human accuracies: Image or edge gist?,” in Computer Vision and Pattern Recognition Workshops (CVPRW), 2010 IEEE Computer Society Conference on, pp. 41–47, 2010.
- [8] W. Kim, J. Park, and C. Kim, “A novel method for efficient indoor–outdoor image classification,” Journal of Signal Processing Systems, vol. 61, no. 3, pp. 251–258, 2010.



