Deep learning (DL) models have driven advancements in AI and machine learning but face challenges such as interpretability, susceptibility to adversarial attacks, dependency on pre-trained networks, and high computational demands. These limitations hinder their deployment on mobile and edge devices.
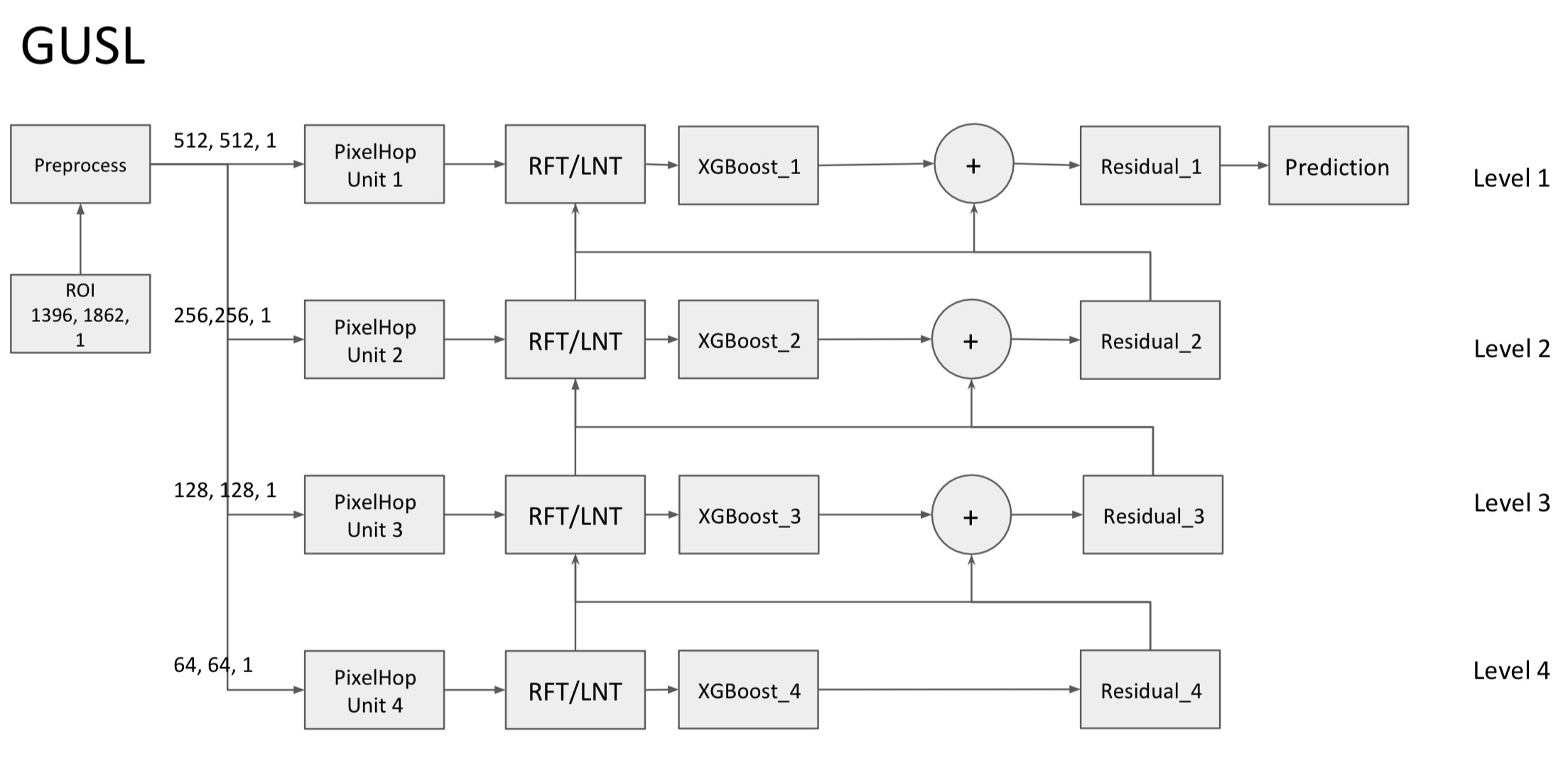
Chee-An Yu, inspired by the concept of Green AI/ML (GL) introduced by Kuo, focuses on developing energy-efficient, mathematically transparent models with small sizes and low complexity. These models excel in limited-data scenarios and are suitable for both cloud and edge environments. The current project explores GL methods to learn RF signatures for detecting jamming signals and reconstructing the original signal using the Green U-Shape Learning (GUSL) pipeline.[1-3]
Initial applications of GL in wireless communications have shown promise, with efficient performance in few-shot learning tasks and reduced computational requirements.
References:1. Chen Chung, C.-C. Jay Kuo, and Shang-Ho Tsai, “Effective and efficient beam tracking with green learning,” IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Valencia, Spain, September 2-5, 2024.
2. Tzu-Ching Liao, Wan-Jen Huang, and C.-C. Jay Kuo, “Green-learning based design of RIS-assisted MIMO systems based on implicit CSI,” IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Valencia, Spain, September 2-5, 2024.
3. Kai-Rey Liu, Sau-Hsuan Wu, C.-C. Jay Kuo, Lie-Liang Yang, and Kai-Teng Feng, “3D positioning via green learning in mmWave hybrid beamforming systems,” VTC 2024-Spring, Singapore, June 24-27, 2024.