MCL Research on Prostate MRI Image Segmentation
Magnetic resonance imaging (MRI) is a good way to detect clinically significant prostate cancer and guide biopsies, due to the superior resolution and contrast of imaging, without harming the human body. Based on prostate MRI, prostate segmentation is a process to localize prostate boundaries for radiotherapy and automate the calculation of the prostate volume. Automatic prostate segmentation is an important step in computer-aided diagnosis of prostate cancer and treatment planning [1].
It is very hard to collect and obtain large annotated datasets for AI In Healthcare. We worked with USC Keck Medical School on this project, and they provided us with a large medical dataset, which was very precious and helpful. In addition to this dataset, we also used some public datasets like ISBI-2013 [2] and PROMISE-12[3] to analyze and evaluate our Green U-Shaped Learning (GUSL) methodology.
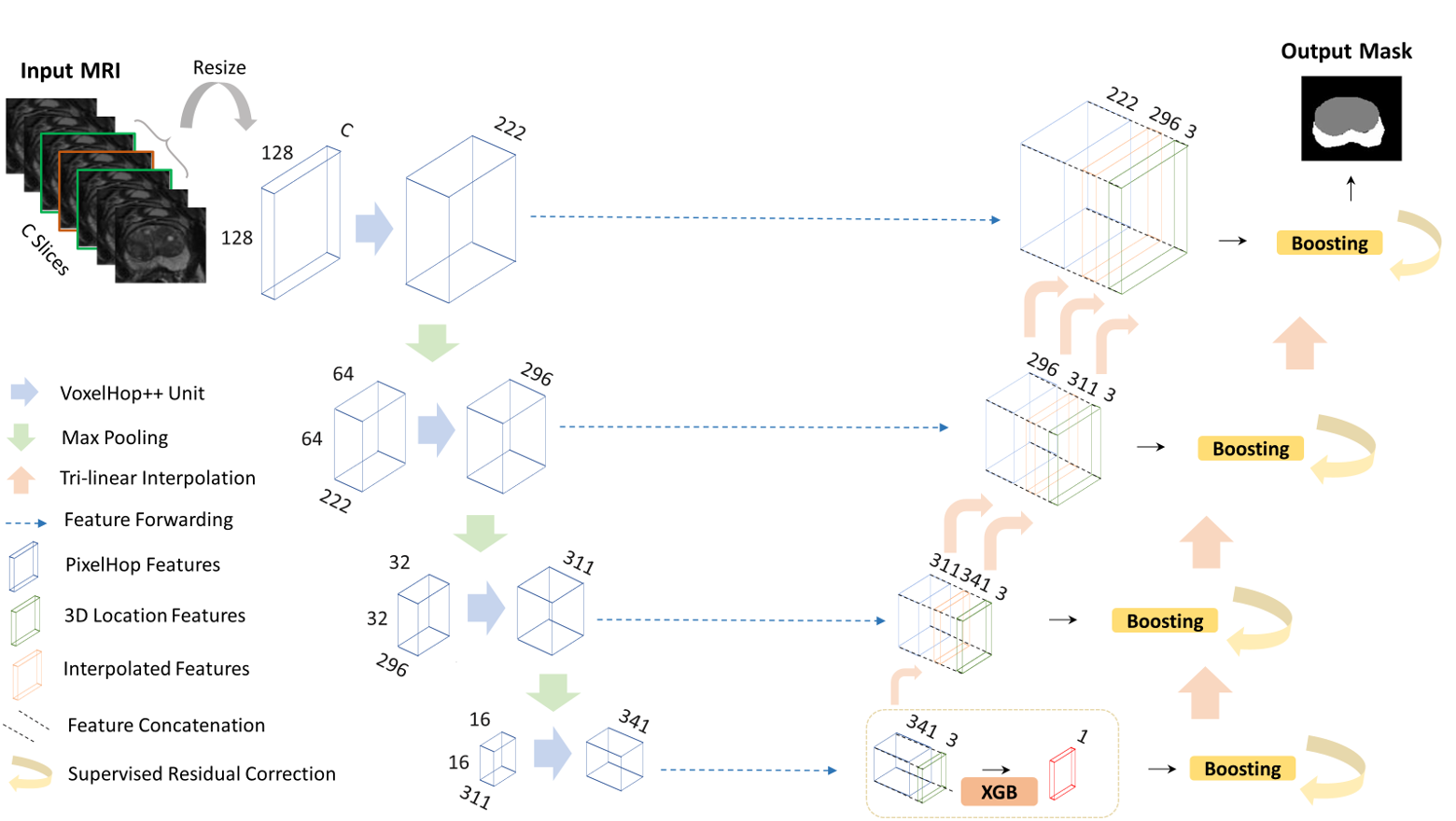
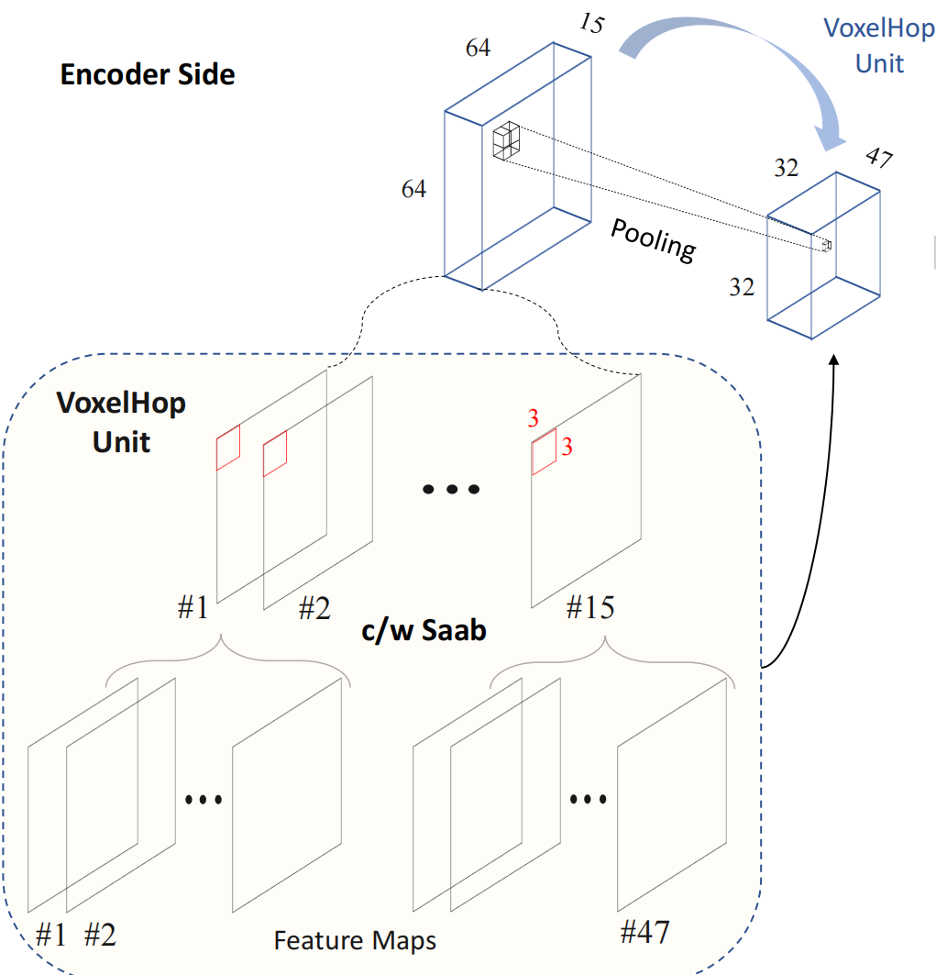
Our Green U-Shaped Learning (GUSL) framework is a feed-forward encoder-decoder system based on successive subspace learning (SSL), and it consists of two modules: 1) encoder: fine to coarse unsupervised representation learning with cascaded VoxelHop units, and 2) decoder: coarse to fine segmentation prediction with voxel-wise regression and local error correction. Our model is lightweight and totally transparent while keeping comparable performance.
We have done 5 cross-validations for the dataset from USC Keck Medical School. For T2-cube MRIs, the Dice Similarity Coefficient (DSC) of the prostate segmentation was over 93%. The USC Keck Medical School doctors were very satisfied with these impressive results. In the next step, we will apply our GUSL model to some public datasets and then compare and analyze the performance of our method with some state-of-the-art Deep Learning methods. In the future, we aim to develop methods for segmenting other organs like cardiac. I hope our methods [...]