PhD Hooding Ceremony 2026
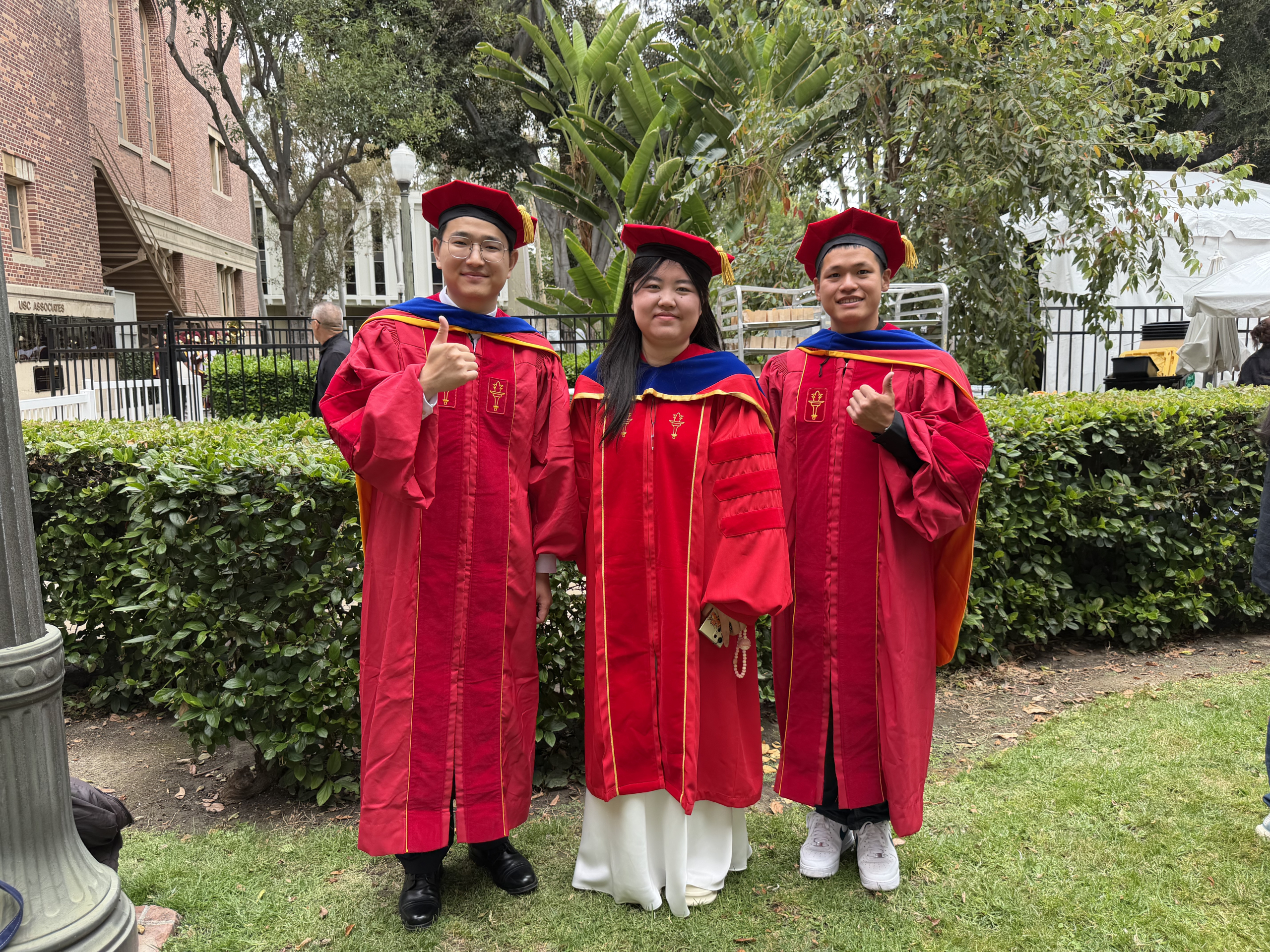
Three MCL members attended the Viterbi PhD hooding ceremony on Wednesday, May 13, 2026, in the Bovard Auditorium. They were Tsung-Shan (Kevin) Yang, Aoling Feng, and Xinyu Wang. Congratulations to them on their accomplishments and on completing their PhD program at USC!
Tsung-Shan (Kevin) Yang received his Bachelor’s degree in Chemistry and Electrical Engineering from National Taiwan University (NTU) in 2019 and his Master’s degree in Electrical Engineering from NTU in 2021. His thesis is titled “Interpretable and Efficient Multi-Modal Data Interplay: Algorithms and Applications”. He has joined LinkedIn.
Aolin Feng received the B.S. degree in electronic information engineering and M.S. degree in information and communication engineering from the University of Science and Technology of China, Hefei, China, in 2019 and 2022, respectively. His thesis is titled “Green Image Coding: Principle, Implementation, and Performance Evaluation”. He will be joining Google.
Xinyu Wang received the B.S. degree in Electronic and Electrical Engineering from the University of Electronic Science and Technology of China (UESTC) in June 2019, and the M.S. degree in Electrical Engineering from the University of Southern California (USC) in 2021. She joined the Media Communications Lab in summer 2021. Her thesis is titled “Towards Efficient Visual Perception: From Feature Learning to Visual Reasoning”. She will be joining Google.
Congratulations to them all! We wish them all the best for their future!